BlueME: Robust Underwater Robot-to-Robot Communication Using Compact Magnetoelectric Antennas
BlueME Overview
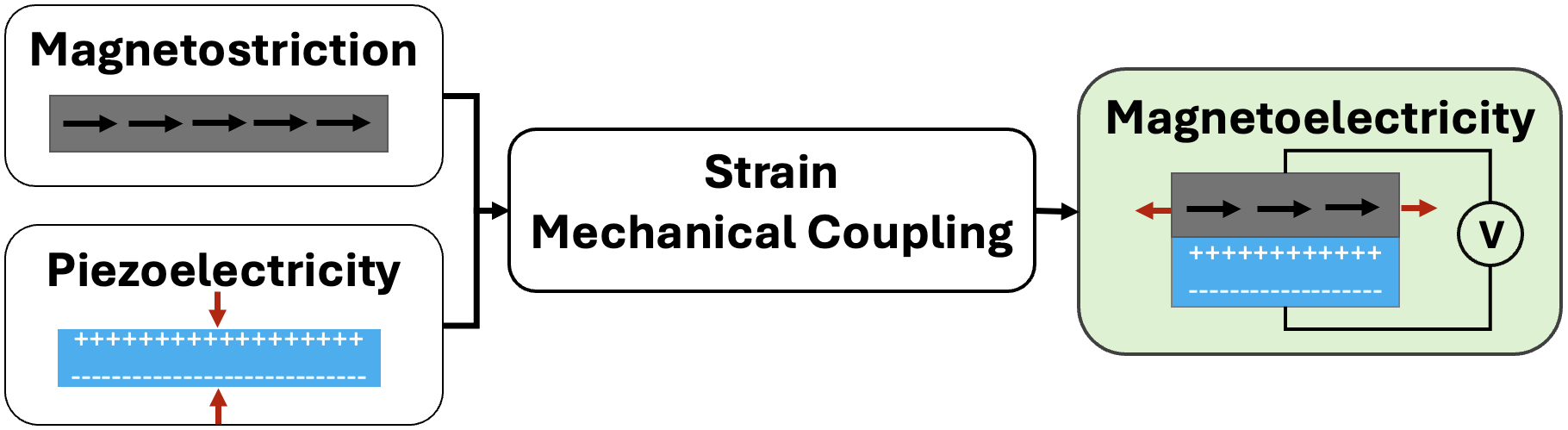
Magnetoelectric (ME) antennas offer a promising solution to overcome the limitations of acoustic and optical communication in underwater environments.
By leveraging the magnetoelectric effect, these antennas efficiently transmit and receive very-low-frequency (VLF) electromagnetic signals with a more compact
design than traditional electrically small antennas (ESAs). This efficiency, combined with their resilience to multi-path interference, non-line-of-sight requirements,
and Doppler effects, makes ME antennas well-suited for space- and power-constrained underwater applications.
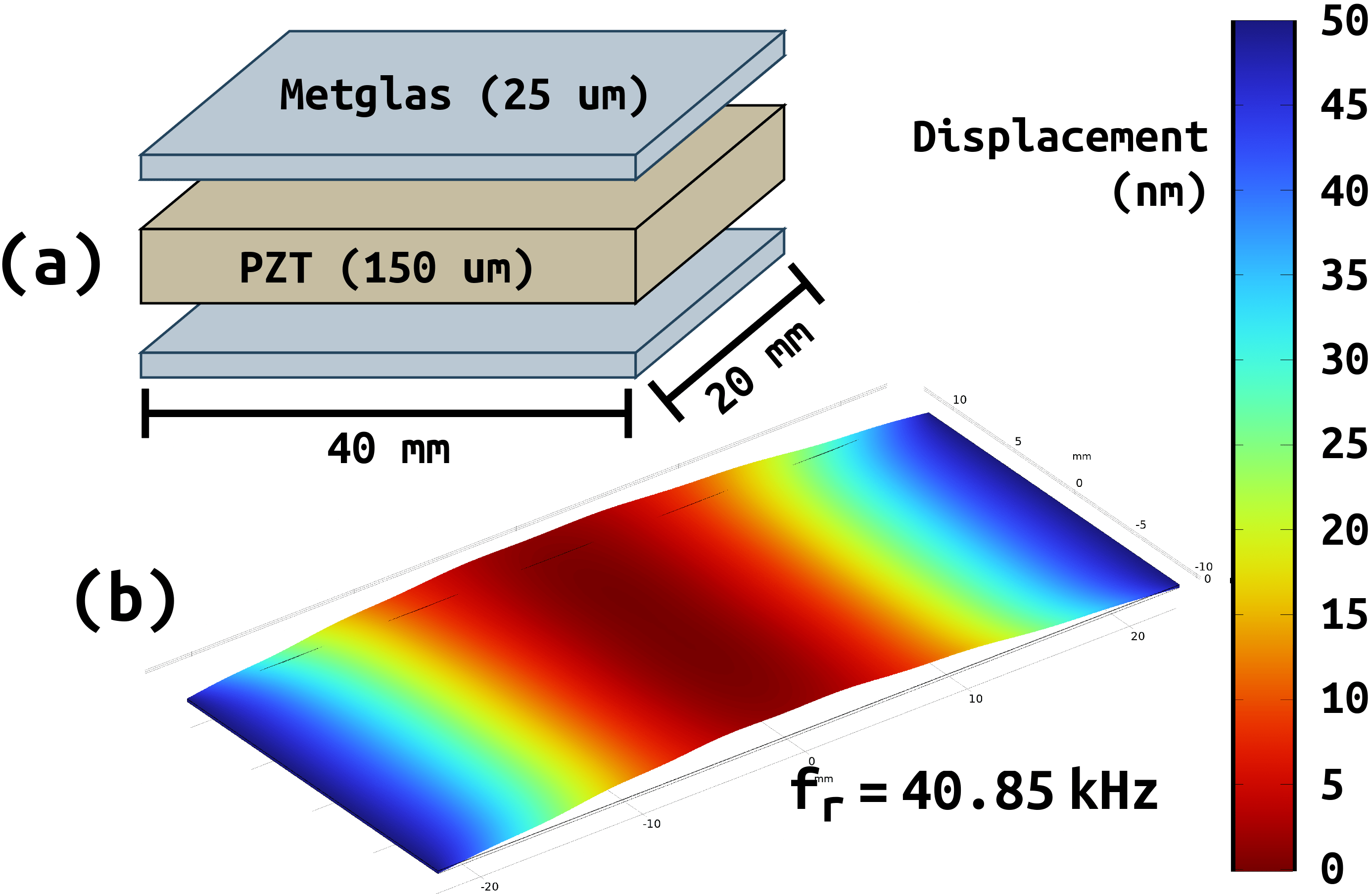
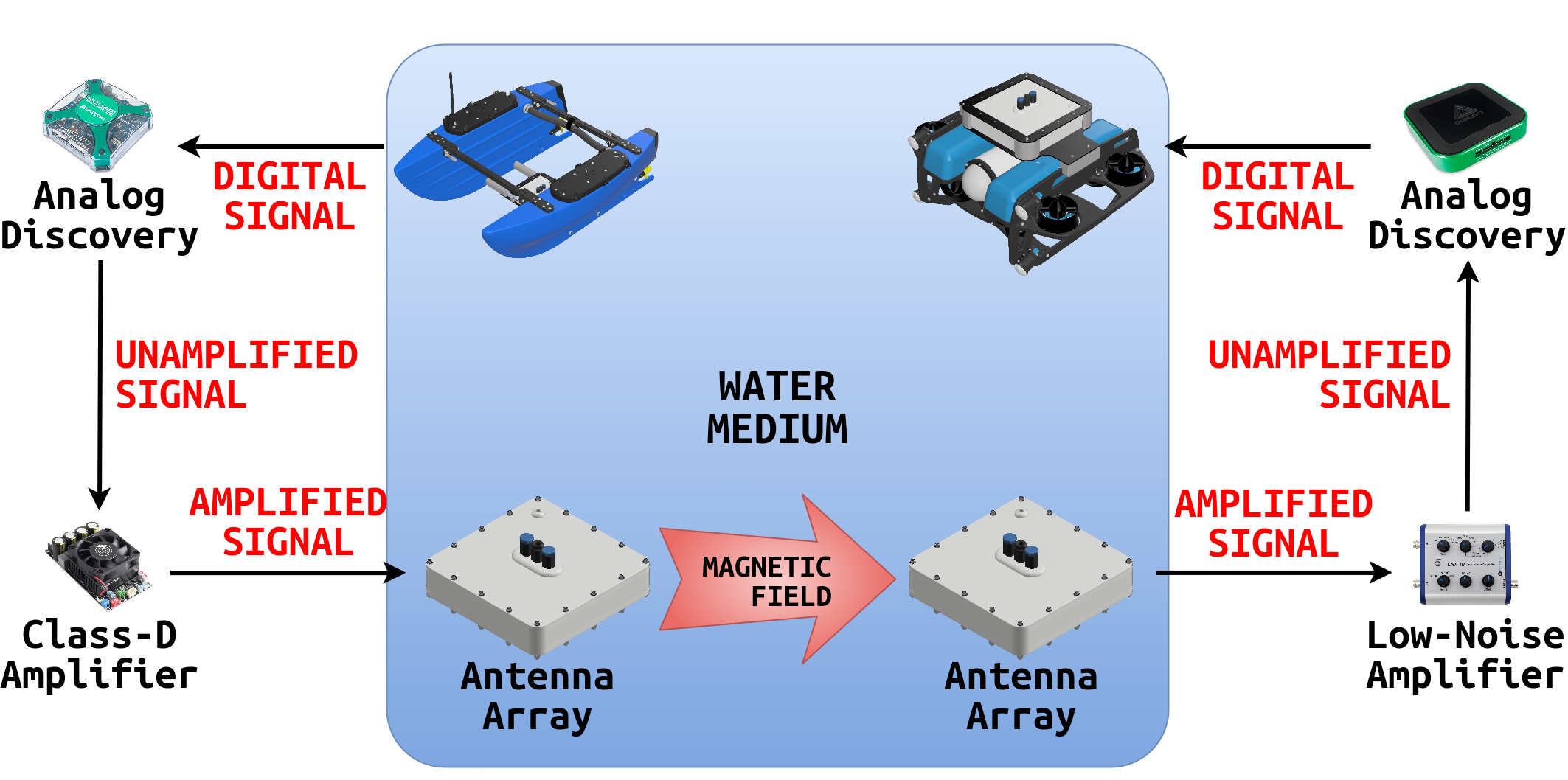
In this project, we present the design, development, and validation of BlueME, a novel magnetoelectric (ME) antenna system for
real-time data transmission between underwater robots. We use a compact array of ME antennas integrated into pressure-compensated enclosures for
real-time data transmission and retrieval between robots and sensors underwater.
While previous ME-based underwater communication efforts have primarily focused on basic connectivity tests in controlled water-tank environments,
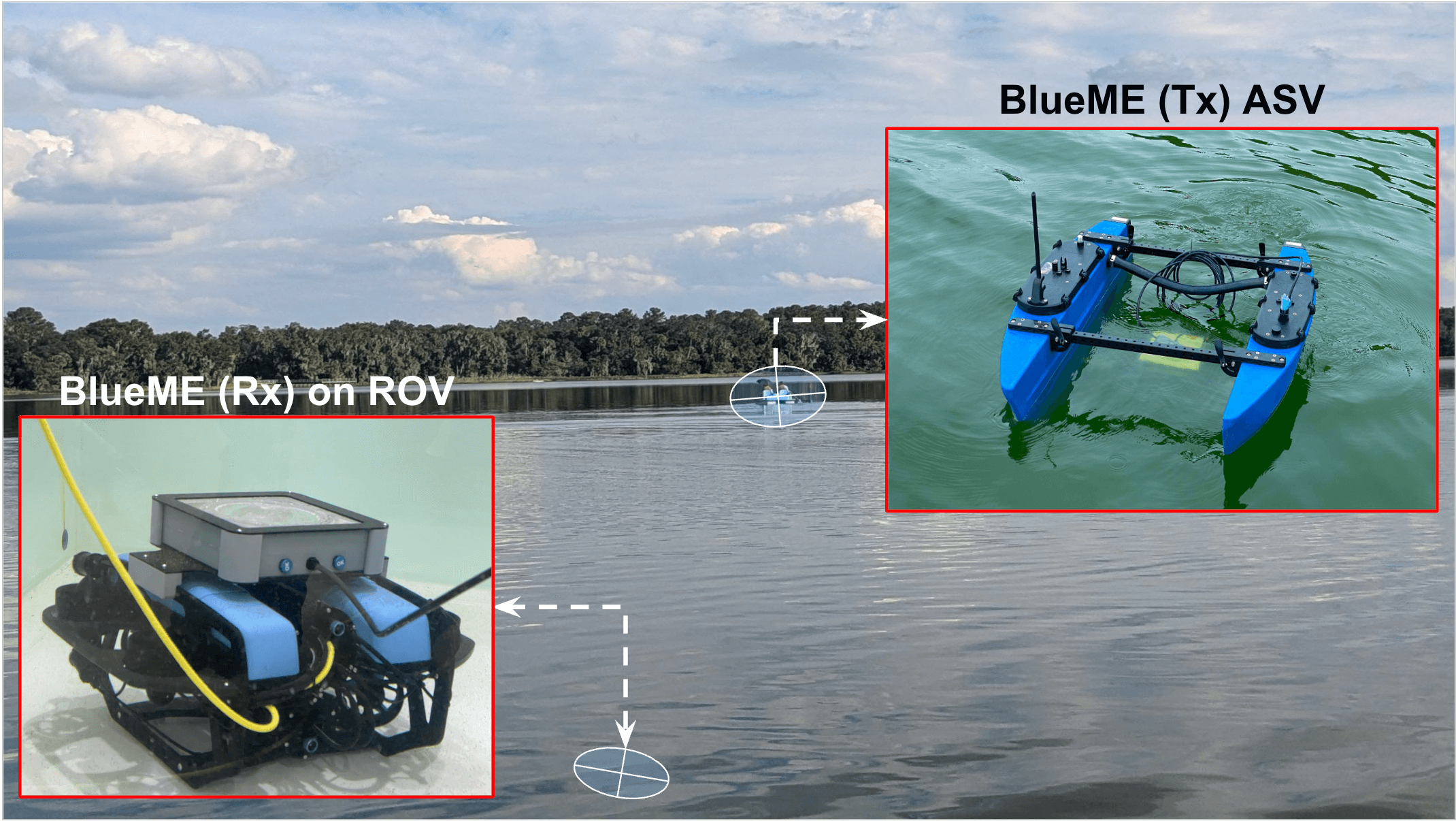
we validate BlueME by open-water trials, demonstrating its potential as a deployable communication system for marine robotics applications.
Overall, we make the following contributions:
• We design, simulate, and fabricate an ME antenna array system (BlueME) for real-time underwater communication between mobile robots and/or sensor nodes.
This is the first ME antenna array system tested in practical environments beyond controlled water-tank setups.
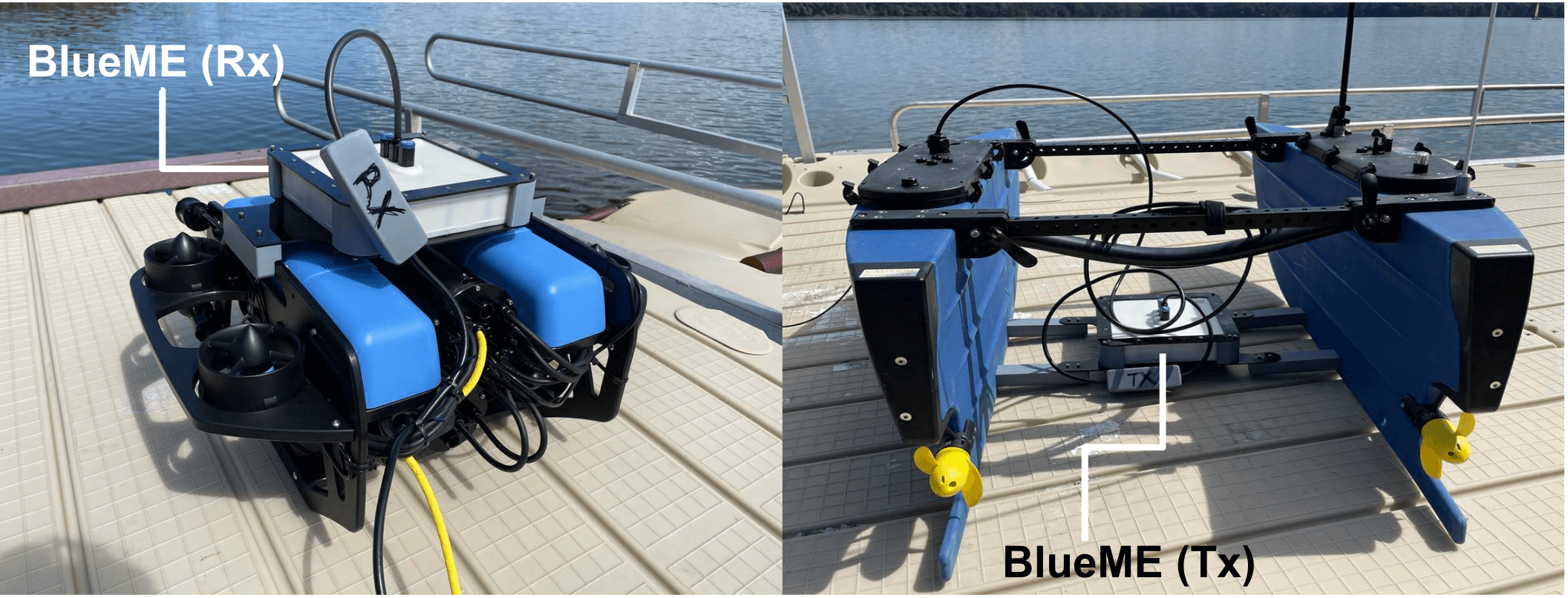
• We present a seamless integration of BlueME into pressure-compensated enclosures to ensure reliable underwater operations.
The enclosed system is compact and portable for use on low-power embedded devices.
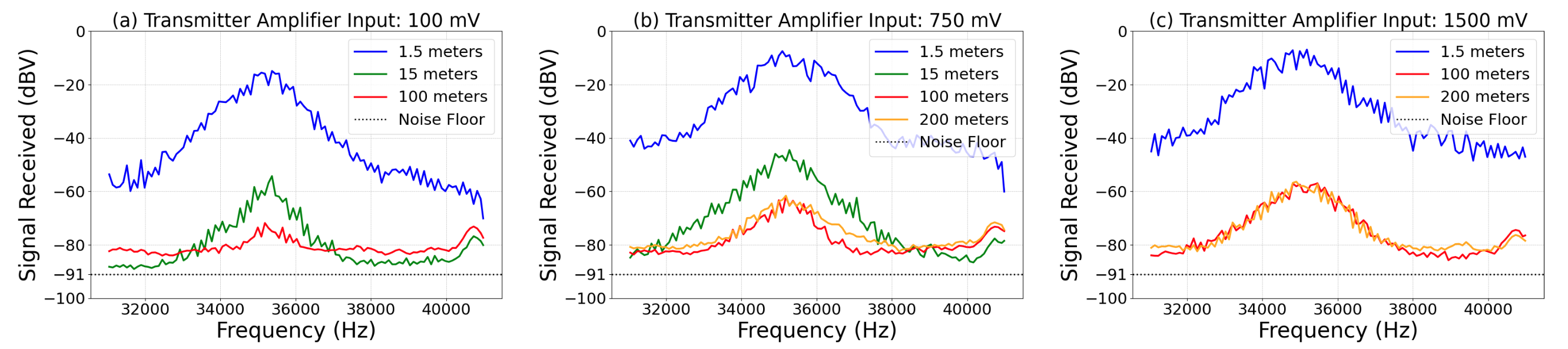
• We validate the system through simulation as well as open-water experiments, demonstrating its effectiveness for underwater communication. The system performs
reliably when fully submerged and is unaffected by turbidity, line-of-sight obstacles, and shallow-water interference, which limit acoustic and optical systems.
• Our field deployments reveal that we can achieve high-fidelity communications between mobile robots for up to 200 meters with a power footprint of only 1 watt.
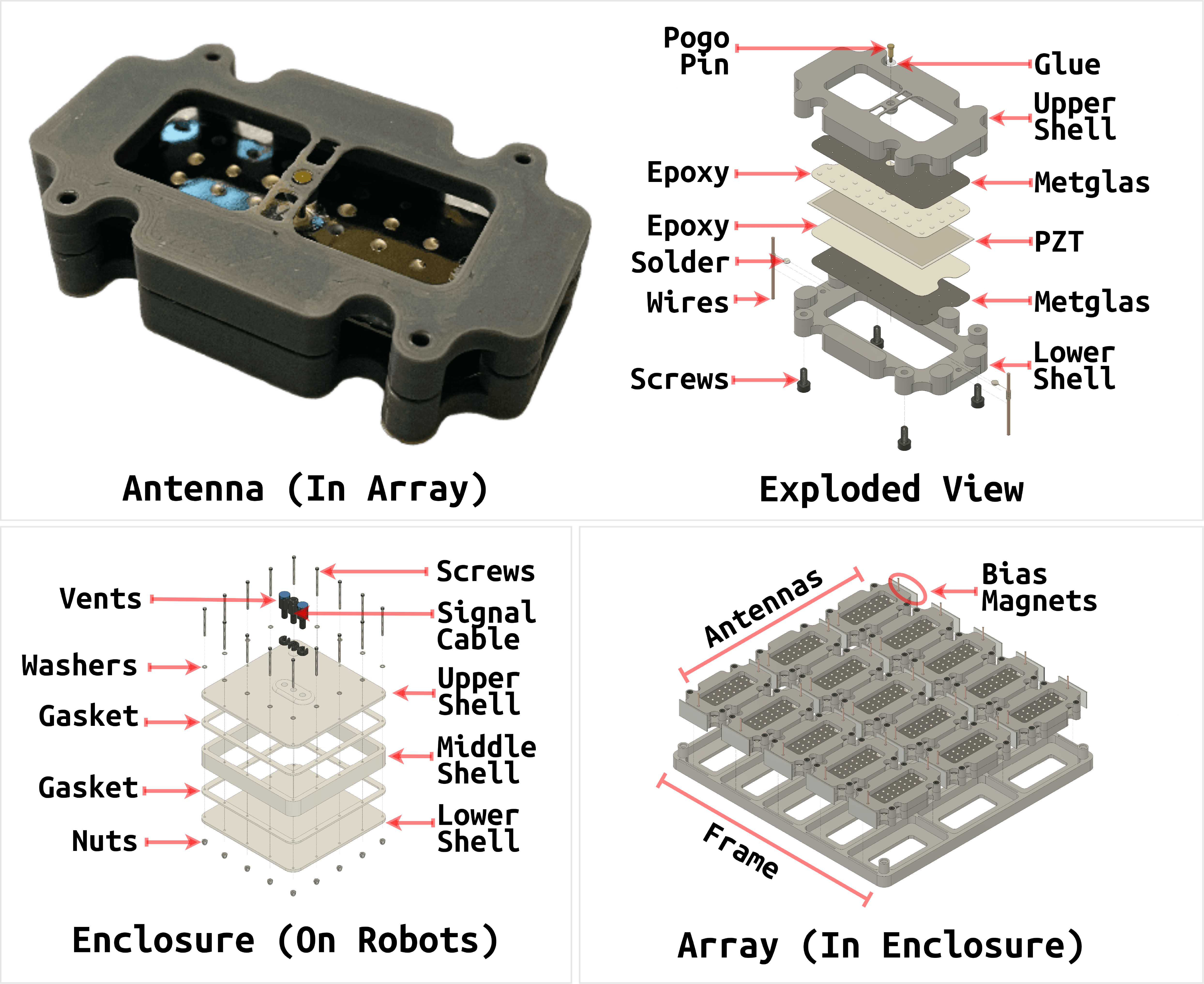
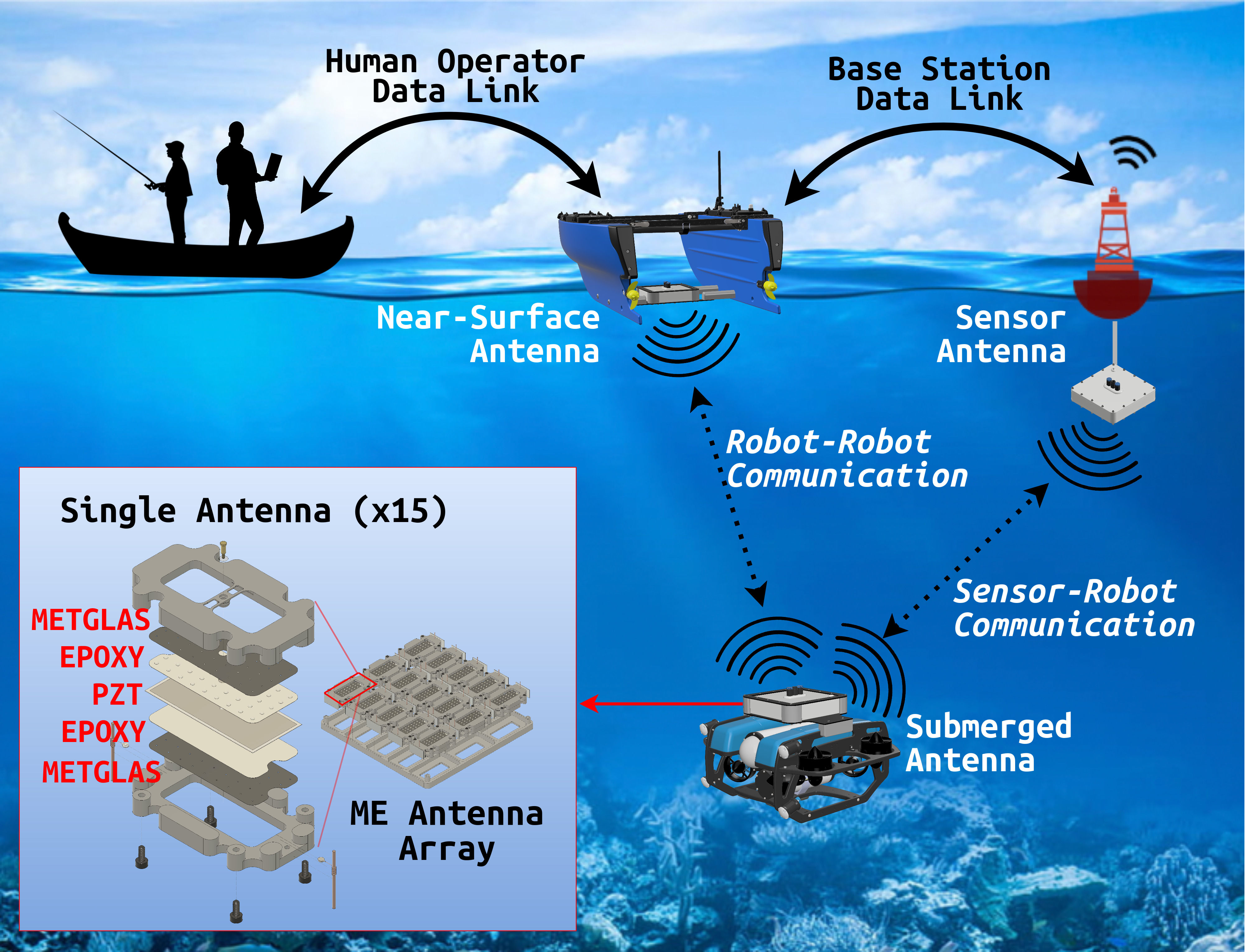 The proposed BlueME system includes a novel ME antenna design; we use a
3x5 array of these antennas to enable real-time communications between underwater robots and wireless sensor nodes.
The proposed BlueME system includes a novel ME antenna design; we use a
3x5 array of these antennas to enable real-time communications between underwater robots and wireless sensor nodes.