INSTRUCTOR and TA
Md Jahidul Islam. Office Hours: Friday 4:00 PM - 5:30 PM. @LAR-339D.
Lecture: M/W/F 4:00PM-4:55PM @LAR-0340
TA: TBD
COURSE PREREQUISITES
EEL 4744C with minimum grade of C
Fluent in C and assembly programming
Proficiency in Python programming
Textbooks
Real-Time Operating Systems for ARM Cortex-M Microcontrollers (4th Edition).
By Jonathan W Valvano. ISBN-13: 978-1466468863, ISBN-10: 1466468866.
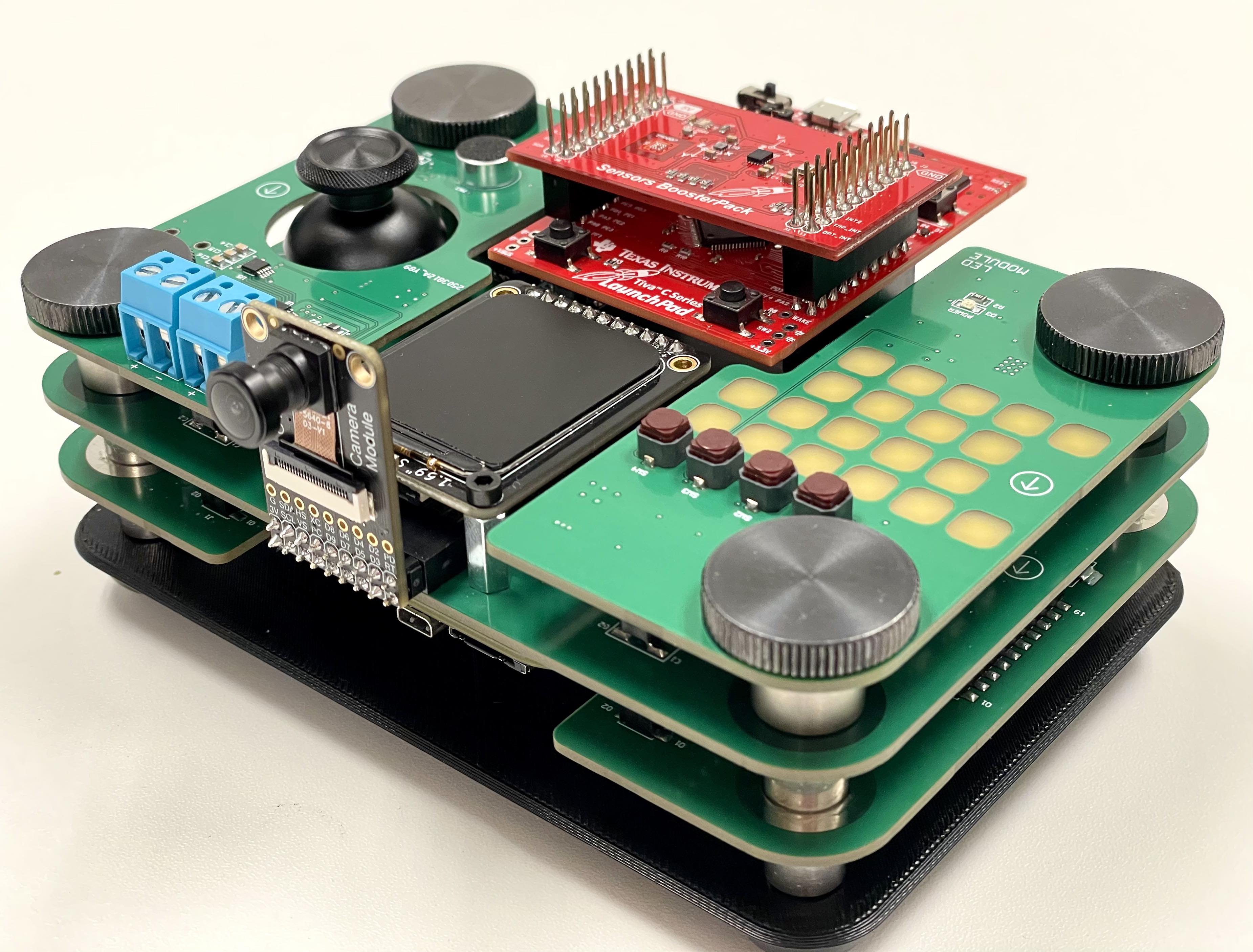
Hardware and Software
TI Tiva C Series LaunchPad
TI SENSOR Booster Pack
TI BeagleBone Black Board
IoT Development Board (with LEDs, LCD touch display and joystick)
TI Code Composer Studio 11
Beagle-Board firmware image
Some relevant libraries and source code (will be provided in class)