








In News!
[8/25]: RoboPI Lab - Taking AI into the Deep!
[12/24]: Dr. Islam Named Yangbin Wang Endowed Rising Star Assistant Professor at ECE, UF.
![]()
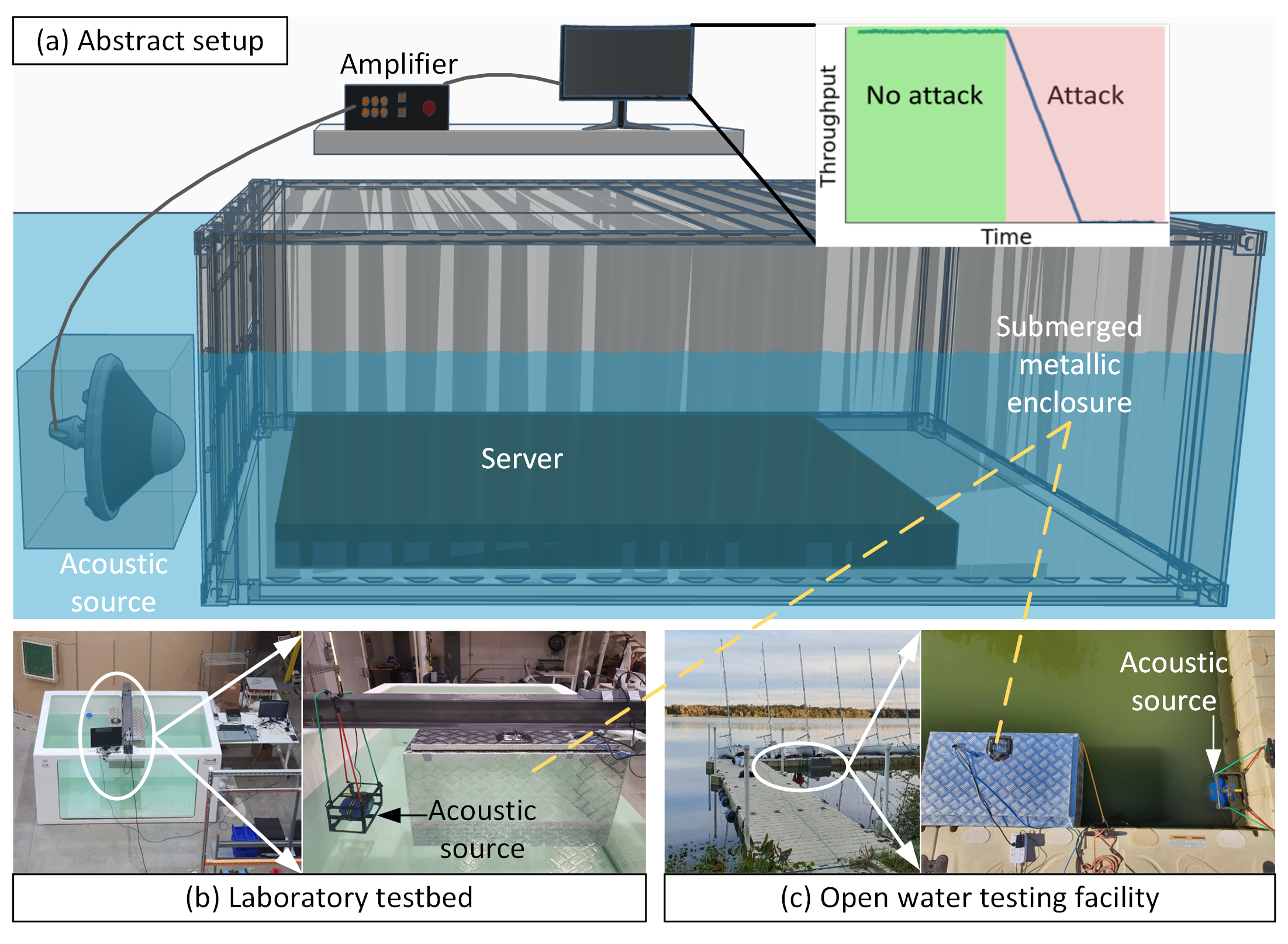
[7/24]: Our research on safeguarding underwater data centers!



[3/23]: RoboPI Lab, Dept. of ECE, College of Engineering, at UF
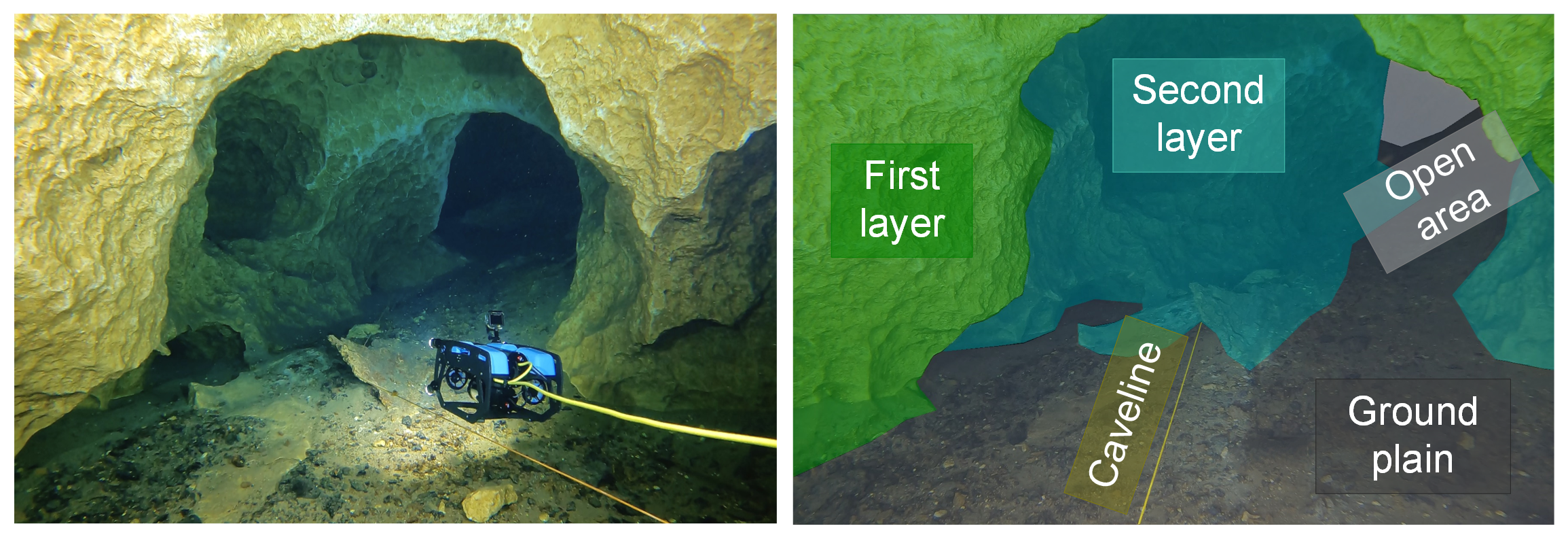
 Robots revolutionize cave cartography
Robots revolutionize cave cartography
Updates
June 2025:
A productive K-12 'RoboGator Day' workshop with RISE program at CPET, UF.

May 2025:
Word2Wave is presented at the ICRA 2025 in Atlanta!

April 2025: Our CavePI paper got accepted for publication at the RSS-2025!
Mar 2025:
Groundbreaking results from our BlueME ocean trials! (LinkedIn)
Mar 2025:
We conducted robotics trials in Miami for subsea mapping project! (LinkedIn)


Mar 2025: Our AquaFuse paper got accepted for publication at the IEEE RA-L. [IF: 5.2]
Mar 2025: Dr. Islam held a seminar at Woods Hole Oceanographic Institution (WHOI).
Mar 2025: Our LightViz work got accepted at the Springer Nature EMA. [IF: 3.1]
Feb 2025: Dr. Islam held a seminar at the Maryland Robotics Center (MRC), UMD.